Team 4099 Blog
The day-to-day activities of Team 4099.
October Workshops Week 1
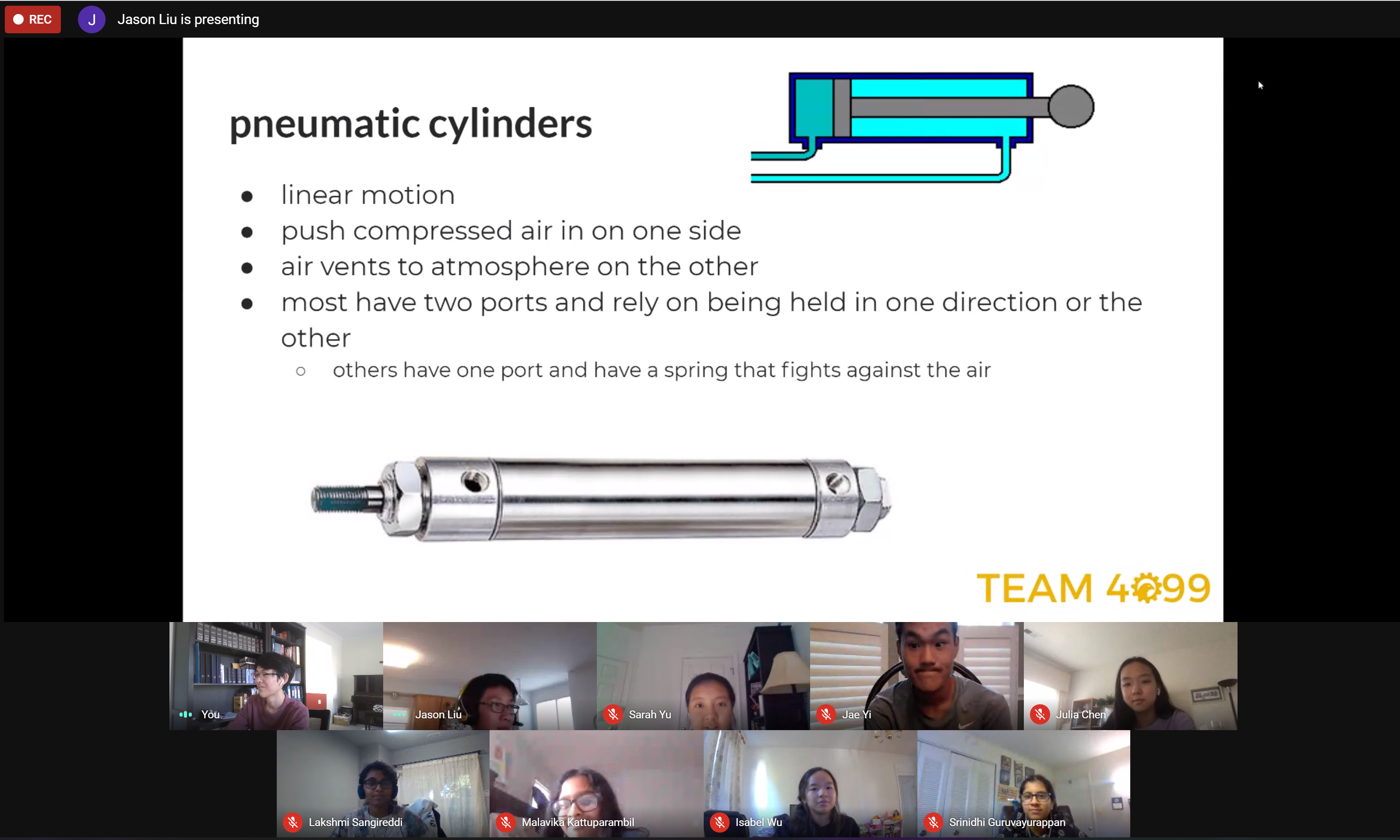
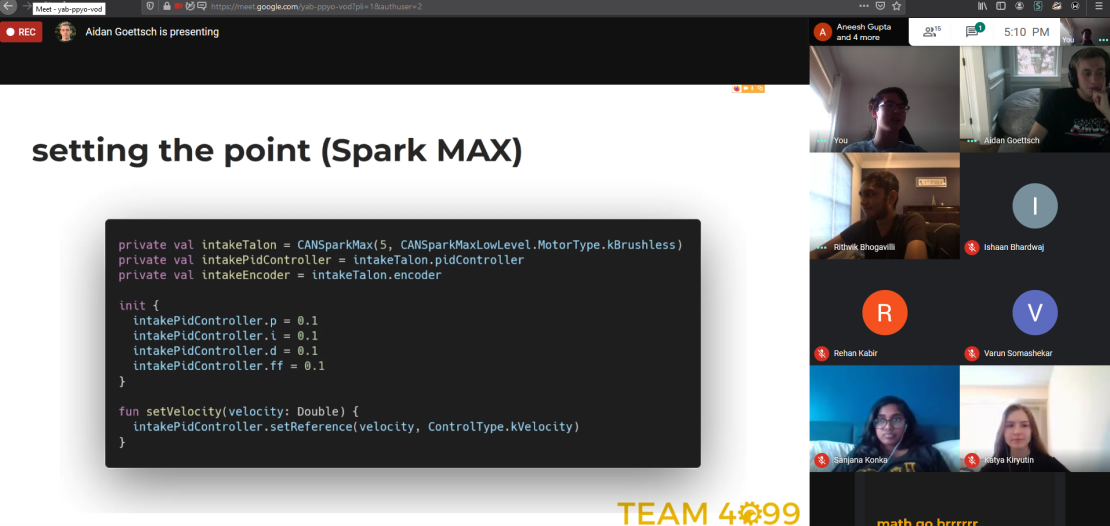
This month’s workshops started on Tuesday. Design went over pneumatics and electronic components that would be used on our robot for this season. Controls went over programming autonomous. First they learned the different types of autonomous commands and then command groups. Next they learned the differences between a path and a trajectory and how to program a trajectory.
Tuesday Design Workshop:
The Business Sync had members given tips to find new businesses to contact. We are currently working on multiple grants and finishing up some.
Thursday, Design went over a basic physics lesson about kinematics. Controls went over characterization and logging. Near the end of the workshop, we started to set up our repository for this year.
Thursday Controls Workshop:
On Saturday, Business went over problems they had while filling out grants. Strategy shared updates on the scouting data analysis app and are getting more people to start working on other aspects of it. They’re also continuing with our strategy training with the 2020 game, and shared what they came up with last week.
Saturday Strategy Workshop:
September Workshops Week 3
Week 3 of workshops started on Tuesday. Design went over utilizing extrude in Onshape as well as using feature scripts to create tubing from prisms and create gussets for tubing. Additionally, they went over assemblies and using different types of mates to attach components. Controls on the other hand went over the basics of PID. The involvement and use of calculus resulted in some confusion, but the leads cleared up confusion.
Tuesday Controls Workshop:
This week’s Business Sync had to be done without a meeting due to certain problems, however everything went as normal.
On Thursday Design and Mechanical went over Onshape variables, tips & tricks that make cad more efficient / fast as well as setting up MKCAD so that you can use better parts. Finally, they went over how to do gears in Onshape, as well as belt/chain/pulleys. Controls went over unit types and motion profiles. Members then practiced with motion profiling, PID, and unit types by creating a subsystem that utilizes these.
Thursday Design + Mechanical Workshop:
Friday was our notion workshop. Notion is a new way of organizing our documents and discussions our team has adopted this year. Many returning members and newcomers attended to learn how it worked and the purposes of it.
Notion Workshop:

On Saturday Strategy shared updates on Tableau, and the scouting data analysis app. They’re getting started with off-season strategy training by looking at the 2020 game. Business met today in order to see if anyone needed help with filling out a grant.
Saturday Strategy Workshop:

Saturday Business Workshop:
2020-2021 Kickoff Part 2
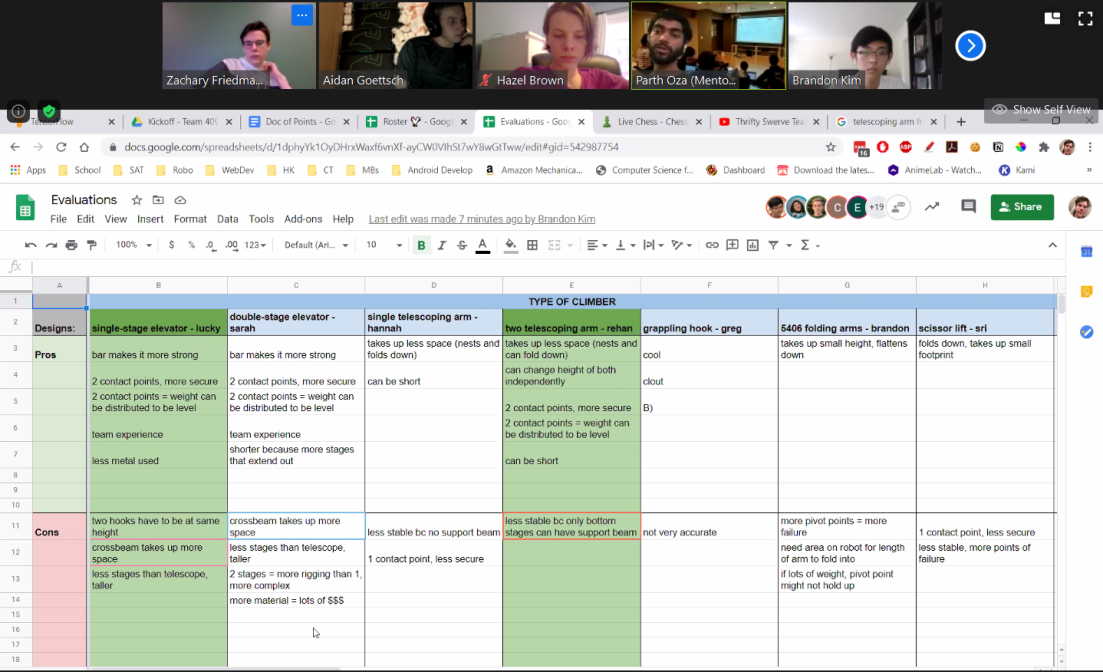
Today was the second part of our kickoff, and we discussed how the subsystems should be made. We did this by splitting off into different groups focused on a subsystem. A problem that arose was a limit on motors as the drivetrain would take 12. After the different groups discussed what we should do, we regrouped and explained our evaluations to the team. Now we know an idea of what our robot looks like, subteams can now start working on the bot!
Discussing Decisions:
2020-2021 Kickoff
Today was kickoff for our team for the 2020-2021 season! An introduction to Infinite Recharge and how the game operates was given to newcomers. Later, all other members joined the meet to review the rules and restrictions. Near the end, members individually watched different teams and observed what they did last season. Finally, we devised our goals, needs, wants, and wishes for this season. Tomorrow we plan to figure out which subsystems we’ll need and start to create a basic layout for the bot.
Newcomers & Leads:

Everyone:

September Workshops Week 2
Tuesday was the start of week 2 of our workshops. Fabrication & Design worked on learning the basics of CAD and using Onshape. Controls worked on learning how to code motor controllers and making basic subsystem commands. In the workshop, newcomers experienced difficulty creating the new class for the subsystem commands, while fixing mistakes in their subsystem object. In the end, most members were able to fix their mistakes and pushed their updates to their own branch here.
Tuesday Design + Mechanical Workshop:
Tuesday Controls Workshop:
Wednesday was our weekly business sync. The Boy Scouts of America (BSA) curriculum we are currently developing is progressing smoothly, with the basics hopefully being completed by the next sync. Next, our Chairman’s Award script just needs general revisions and needs to be condensed. Each member is currently working on contacting a company and our AstraZeneca grant application still needs to be tuned.
Thursday was the second day of workshops this week. Those who attended the Design workshop learned basic designs for the subsystems related to Infinite Recharge. For example, members learned the different designs for a shooter such as a turret and variable hood. Controls having learned how to create a basic subsystem with commands, were tasked with assigning a command to a button on a controller. For instance, members were tasked with assigning the A button on a controller to make the intake spin inwards.
Thursday Design + Mechanical Workshop:
Thursday Controls Workshop:
To end things off, this weekend is our kickoff and we hope we have a great time!
Today programming helped work on the drive train by eliminating any latency from the Motor controllers. They also got the Mule drivetrain to move with a marginal error of 1% when running for a vision target. They also continued working on the superstructure and the LED code. Business contineud working on the MSDE grant and the Chairmans Executive Summaries. Mechanical fully assembled and tested the intake as well as working on the feeder. Design presented the finished subsystems to the rest of the team and made some changes before milling. The following is testing vision code.
Today programming worked on the superstructure code and touched up the LED code. They also worked on getting the vision to align with the target and debugged the drivetrain. Mechanical prototyped the feeder subsystem and figured out how to generate CAM. Electrical added CAN wire connectors to the Spark Maxes and finished the electrical board CAD. Design has completelty completed the finalized drive train and climber for the season. Business continued on the MSDE grant and the Charimans video.
Today was our first school workday. The business subteam began writing their executive summaries and outlining a storyboard for the chairman’s video. They also worked on the MSDE grant and wrote the newsletter for the week. The design subteam has begun working on each subsystems and geared the drivetrain. The electrical subteam replaced new components on the mule with older components. They also diagnosed issues with the drivetrain’s inverted settings.
Workday 2/5/19
Mechanical continued to assemble drivetrain and started assembling cargo and hatch panel intakes. We ran into some clipping issues but worked with the Design team to fix it.
Design adjusted the intake geometry and added limit switches to the elevator.
Business continued to work on the Chairman’s Award video and essays.
Programming got vision assisted aiming to work. We worked on calculating encoder values and using network tables to communicate between the driver dashboard and the robot.
Workday 2/4/19
Programming worked on developing a procedure for tuning PID values, determining encoder conversions, and worked on communication with the driver dashboard. We also tried to test vision.
Electrical worked on the board and made sure CAN worked. We also worked with the new compressor, PDP and Neos/Spark Maxes.
Fabrication worked to finish the intake for the robot by putting the hubs into the rollers and the bearings into the side of the shafts.
Business continued to work on executive summaries and the video.